Guía técnica aplicada sobre gobernadores, AVR y estrategias de control para GTGs en sistemas de generación en isla e interconectados — incluyendo reparto de carga, modos de AVR, redundancia N+1/N+2, step load y protección.
Contenido
- TL;DR
- Fundamentos P–f y Q–V
- Niveles de control
- Isla vs interconectado
- Modelo de generador
- Gobernador: estrategias
- Control avanzado de frecuencia
- AVR: mecanismo VDERIVED
- Modos de control del AVR
- Reparto de reactivos: CCC
- Redundancia N, N+1, N+2
- Inercia y electrónica
- Step load: 3 escenarios
- Curva P–Q
- Protección y UFLS
- Diseño y pruebas
- Conclusiones
- Glosario
01TL;DR
Frecuencia y voltaje son dos equilibrios de potencia que se controlan en capas
Frecuencia = equilibrio P activa (gobernador lo regula). Voltaje = equilibrio Q reactiva (AVR lo regula). La elección de estrategia de control depende del número de GTGs en paralelo, la topología de la red y si el sistema opera en isla o conectado a utilidad.
- 1 GTG en línea → gobernador isócrono + AVR en control automático de voltaje (AVC)
- ≥2 GTGs en paralelo, misma barra → Isochronous Load Sharing + Cross Current Compensation (CCC): primera elección para islanding no complejo
- Isla = baja inercia → RoCoF rápido; reserva giratoria y UFLS escalonado son críticos
- N+1 garantiza absorción del trip del GTG más grande; N+2 puede ser necesario si el arranque del motor de MV más grande exige más GTGs de los requeridos en estado estacionario
- Load shedding moderno: detección + reconocimiento < 80 ms, total sistema < 200 ms. Protección 87G (diferencial de generador) es la más rápida para faults en cable/devanado
02Fundamentos P–f y Q–V
Un sistema eléctrico mantiene su frecuencia nominal solo si la potencia activa generada iguala a la demanda más pérdidas. Un incremento súbito de carga sin respuesta suficiente del gobernador desacelera el rotor — la frecuencia cae. Una reducción de carga lo acelera — la frecuencia sube.
De forma análoga, el nivel de voltaje depende del balance de potencia reactiva. Un déficit de Q produce caídas de tensión; un exceso puede elevarlo sobre límites admisibles. La dependencia es fuerte con la impedancia de la red y la ubicación de los inyectores de Q.
- Frecuencia ≈ velocidad promedio de las masas giratorias del sistema (inercia total).
- Voltaje ≈ resultado de cómo y dónde se inyecta o absorbe Q en una red de cierta impedancia.
- En redes con predominio de reactancia (sistemas isla típicos): P fluye según ángulo δ entre voltajes; Q fluye según diferencia de módulos. Control P–f y Q–V pueden tratarse como lazos casi desacoplados en primera aproximación.
03Niveles de control de frecuencia
En redes grandes se distinguen tres niveles de regulación. En plantas aisladas industriales, la función secundaria y parte de la terciaria se implementan en el PMS local sin participación de un centro de control de red.
- Regulación primaria: respuesta automática local de los gobernadores. Limita la desviación inicial de frecuencia tras una perturbación. Actúa en segundos.
- Regulación secundaria (AGC / LFC): ajuste centralizado de consignas de potencia para devolver la frecuencia a valor nominal y respetar intercambios programados entre áreas. Actúa en minutos.
- Regulación terciaria: redistribución de generación y reservas mediante arranque/parada de unidades y despacho económico. Planificación horaria.
04Modo isla vs interconectado
En un sistema interconectado fuerte, la red actúa como fuente «infinita» para cada generador individual — la inercia agregada es enorme y las variaciones locales de carga tienen escaso efecto en la frecuencia global. En modo isla, la inercia efectiva suma pocas máquinas y los cambios de carga producen desviaciones mucho más rápidas y pronunciadas.
| Aspecto | Modo isla | Modo interconectado |
|---|---|---|
| Inercia efectiva | Baja — RoCoF alto ante perturbaciones. | Alta — cambios suaves y bien amortiguados. |
| Referencia de frecuencia | Definida por gobernadores locales (isócrono / PMS). | Impuesta por la red; el generador sigue la barra. |
| Respuesta ante step load | Caídas severas de f y V si la reserva es insuficiente. | Perturbación repartida entre muchas unidades. |
| UFLS | Crítico — sin él, un trip puede colapsar el sistema. | Coordinado con la filosofía del operador de red. |
| Control de reactivos | Droop AVR o CCC sin referencia externa de Q. | PF/MVAR coordinado con despacho de red. |
05Modelo simplificado de generador síncrono
Para análisis de estabilidad, el generador síncrono se representa como una fuente de FEM interna E' detrás de una reactancia transitoria X'd. El ángulo de carga δ entre E' y el voltaje de barra determina el flujo de P y Q.
- Aumentar torque mecánico (más combustible al GTG) → incrementa P → desplaza δ → tiende a acelerar el rotor. El gobernador regula para mantener f nominal.
- Aumentar excitación → eleva FEM interna → aumenta capacidad de suministrar Q → sube voltaje terminal. El AVR regula la corriente de campo para mantener V nominal.
- La estabilidad de estado estacionario exige δ < 90°. En sistemas isla con pocas máquinas, grandes step loads pueden llevar el ángulo a valores críticos — los estudios de estabilidad transitoria son obligatorios.
06Gobernador: estrategias de control de velocidad
Un droop del 5 % en un sistema de 60 Hz implica una caída teórica de 3 Hz entre vacío y plena carga. En operación real esa caída se reparte entre todas las máquinas participantes. Los gobernadores modernos (microprocesador) implementan estrategias híbridas avanzadas mediante comunicación peer-to-peer o redes de planta.
| Estrategia | Comportamiento | Aplicación típica |
|---|---|---|
| Isócrono | Mantiene velocidad constante mientras MW varía de vacío a plena carga. | 1 GTG online sin paralelo. |
| Droop | Velocidad cae al aumentar MW, proporcional al ajuste de droop (%). | Múltiples GTGs; reparto sin comunicación. |
| Isochronous Load Sharing | Múltiples GTGs comparten MW proporcionalmente y mantienen velocidad constante vía load sharing lines o peer-to-peer. | Primera elección para islanding ≥2 GTGs del mismo fabricante en la misma barra. |
| Isochronous Load Sharing + Fixed Bias Speed | Permite a un GTG conectado a red externa mantener velocidad mientras su MW varía. | GTG en paralelo con red de utilidad. |
| Continuous Rated / Selectable MW | Mantiene MW nominal o seleccionable en modo droop (el MW nominal de GTG varía con temperatura ambiente). | Carga base o despacho específico. |
| PMS Speed Adjust | El PMS ajusta la línea de droop de cada GTG para alcanzar setpoint de velocidad. | GTGs en droop gestionados por PMS central. |
| Speed Adjust Peer-to-Peer | Gobernadores modernos restablecen velocidad vía comunicación directa sin PMS. | Sistemas modernos sin PMS dedicado. |
Ventajas del droop
- Robusto y ampliamente validado en generación industrial.
- Permite paralelo de múltiples unidades sin controlador central único.
- No requiere cableado entre gobernadores para la función básica.
- Se integra bien con control secundario posterior (AGC/PMS).
Limitaciones del droop
- Deja desviación estacionaria de frecuencia bajo carga.
- Requiere sintonía cuidadosa para evitar oscilaciones P–f.
- Necesita intervención del operador o PMS para restaurar f nominal.
07Control avanzado de frecuencia
- Speed bias: ajusta la referencia de velocidad de cada gobernador en función de la desviación de frecuencia global y la reserva disponible — mejora el reparto dinámico.
- Peer-to-peer (load sharing lines): los gobernadores comparten señales de frecuencia y potencia por cableado dedicado o red de comunicaciones, repartiendo carga sin maestro único. Los sistemas legacy usaban cableado blindado par trenzado; los modernos usan protocolos de red de planta.
- Control secundario automático (AGC / PMS): ajusta consignas de P de las unidades participantes para restaurar la frecuencia y los flujos de potencia programados. Actúa sobre el resultado de la regulación primaria — añade complejidad porque opera después de los algoritmos propietarios del gobernador, no los reemplaza.
08AVR: mecanismo de regulación — señal VDERIVED
El AVR mide el voltaje en un punto representativo (bornes del generador o barra principal) y ajusta la corriente de campo del excitador para mantenerlo dentro de una banda de tolerancia. Los AVRs modernos actúan en decenas de milisegundos e incorporan limitadores (OEL, UEL, V/Hz) y opcionalmente un PSS para amortiguar oscilaciones.
Limitadores: sobreexcitación (OEL), subexcitación (UEL), V/Hz, corriente máxima de campo y límites térmicos rotor/estator.
Modos: AVC (voltaje constante), FP fijo, control MVAR, modo V/Hz para subfrecuencia.
Opcional: PSS para amortiguamiento de oscilaciones mediante señal adicional en referencia de voltaje.
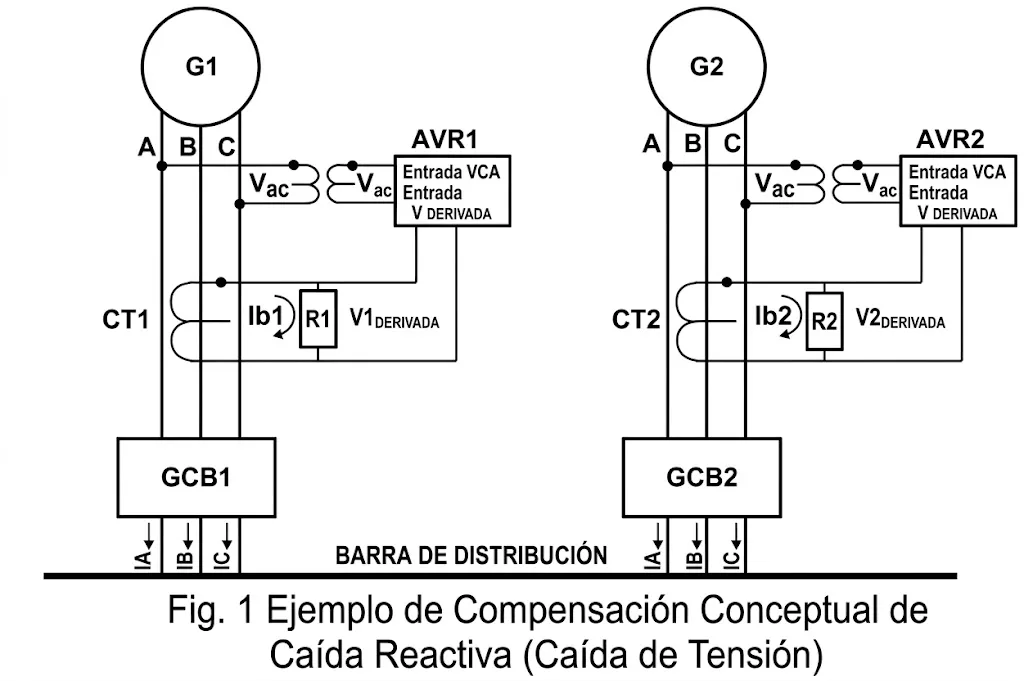
8.1Principio del reactive droop — VDERIVED = Ib × Rext
En AVRs legacy y muchos modernos, el modo droop reactivo basa su señal en la corriente de fase B (Ib) medida por un TC externo en fase B. La corriente circula por un resistor externo y produce un voltaje derivado que se suma vectorialmente a la señal de voltaje Vac:
VDERIVED = Ib × Rext → VSUMA = Vac ⊕ VDERIVED
El AVR compara el ángulo entre Vac y VDERIVED. Ese ángulo cambia según el tipo de carga conectada:
| Tipo de carga | Ángulo Vac vs VDERIVED | Respuesta del AVR |
|---|---|---|
| Resistiva (FP = 1, sin MVAR) | 90° exactos | Sin cambio — VSUMA ≈ Vac. AVR no modifica excitación. |
| Inductiva (Ib en atraso) | > 90° — VDER más en fase con Vac | VSUMA crece → AVR reduce voltaje de salida (droop inductivo). |
| Capacitiva (Ib en adelanto) | < 90° — VDER menos en fase | VSUMA baja → AVR eleva voltaje de salida (droop capacitivo). |
09Modos de control del AVR
Así como los gobernadores tienen múltiples estrategias de velocidad, los AVRs modernos ofrecen estrategias análogas para voltaje y reparto de reactivos. No todos los modos aplican a sistemas islanding no complejos:
| Modo AVR | Descripción | GTGs | Islanding NC |
|---|---|---|---|
| AVC (Automatic Voltage Control) | Mantiene voltaje de barra constante ajustando excitación. Sin compartir MVAR. | 1 | Sí — solo 1 GTG online |
| Reactive Droop (Droop AVR) | Voltaje cae al aumentar MVAR inductivo; sube con capacitivo. Independiente — sin cableado entre AVRs. | ≥2 | Sí — pero voltaje cae en plena carga (5–6 %) |
| Cross Current Compensation (CCC) | MVAR compartido sin caída de voltaje. Requiere TCs interconectados, resistores compartidos y contactos 52bCCC. | ≥2 | Sí — primera elección |
| Droop + PMS Voltage Adjust | AVRs en droop; PMS ajusta referencias para mantener V de barra dentro de ventana aceptable. | ≥2 | Sí — GTGs en diferentes buses |
| Power Factor Control | Mantiene cos φ constante según carga MW del GTG. | ≥1 | No — solo con utilidad |
| VAR Control (MVAR constante) | Suministra MVAR fijo independientemente del MW generado. | ≥1 | No — solo con utilidad |
10Reparto de reactivos: droop reactivo y CCC
Cuando múltiples generadores operan en paralelo, el reparto correcto de Q es tan crítico como el de P. Un generador que asume demasiado MVAR puede alcanzar límites térmicos o de estabilidad de su curva P–Q.
Droop reactivo
Pendiente en la relación V–MVAR: a mayor MVAR inductivo entregado, menor voltaje terminal. Cada AVR actúa autónomamente con su propio TC y resistor.
Limitación: voltaje cae hasta 5–6 % en plena carga
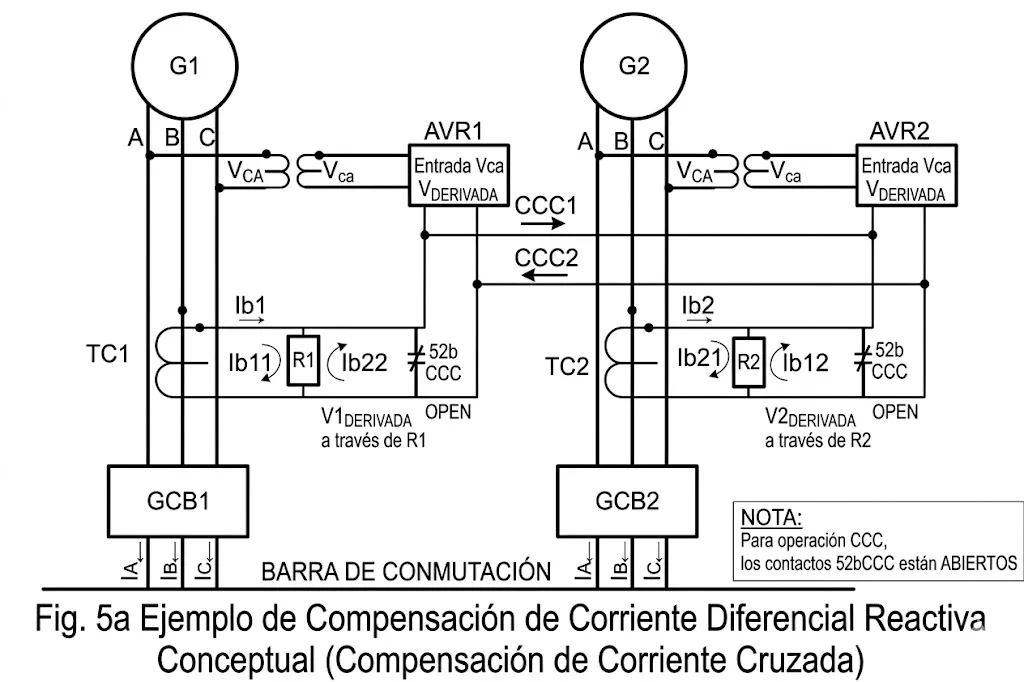
Cross Current Compensation (CCC)
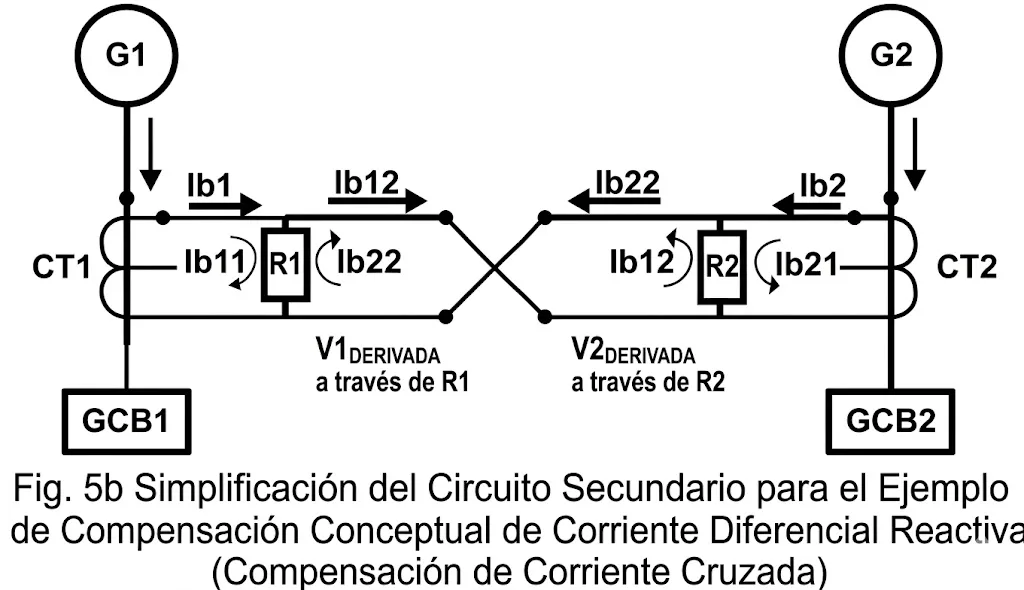
TCs de fase B de cada generador se interconectan mediante resistores de carga compartidos. El circuito CCC produce VDERIVED = 0 cuando el reparto de MVAR es igualitario — ningún AVR actúa correctivamente.
Requiere: misma barra · 52bCCC · confirmación distancias
CT₁ (G1): Ib1 sale por el «punto» → se divide: 1 A entra R₁(+) · 1 A entra R₂(−).
CT₂ (G2): Ib2 sale por el «punto» → se divide: 1 A entra R₂(+) · 1 A entra R₁(−).
En R₁: +1 A y −1 A se cancelan → VDERIVED1 = 0 V → AVR1 mantiene voltaje sin cambio.
En R₂: igual → VDERIVED2 = 0 V → AVR2 también mantiene voltaje sin cambio.
Si G1 comienza a entregar más MVAR que G2, aparece una corriente circulante entre R₁ y R₂. La caída de tensión en R₁ hace que AVR1 vea más carga inductiva → reduce voltaje de G1. La caída en R₂ hace que AVR2 vea carga capacitiva → eleva voltaje de G2. Este mecanismo «dar y recibir» restaura el equilibrio sin cambio neto del voltaje de barra.
Contactos 52bCCC: normalmente cerrados (abre cuando el interruptor del generador está cerrado, es decir, cuando el GTG está en línea). Cuando un GTG está fuera de línea con su interruptor abierto, los 52bCCC cerrados cortocircuitan el TC de ese GTG, desconectándolo del circuito CCC y evitando que perturbe el reparto de los GTGs en línea.
11Redundancia N, N+1 y N+2
Los términos N, N+1, N+2 expresan cuántos GTGs son necesarios en cada condición operativa. La carga estacionaria determina N, pero los requisitos de arranque y mantenimiento determinan cuántas unidades deben estar disponibles en todo momento.
N — Operación normal
Mínimo de GTGs para cubrir la demanda MW/MVAR máxima en estado estacionario.
N+1 — Redundancia por trip
Un GTG adicional en línea. Si uno tripea, los N GTGs restantes absorben la carga — dentro de su capacidad de step load verificada.
N+2 — Disponibilidad garantizada
Puede exigirse cuando arrancar el motor de MV más grande requiere más GTGs que los necesarios en estado estacionario, asegurando disponibilidad aunque 1 GTG esté en mantenimiento.
- N=2 Carga máxima en estado estacionario requiere solo 2 GTGs en línea.
- N+1=3 Arranque del motor de media tensión más grande requiere 3 GTGs. La preocupación mayor no es el incremento de MW activos sino la demanda de MVAR para el inrush inductivo del motor, que deprime el voltaje de la barra principal. Con solo 2 GTGs, la caída de V puede ser inaceptable o disparar protecciones de subtensión.
- N+2=4 Para garantizar que 3 GTGs estén disponibles cuando uno esté en mantenimiento o reparación programada, los 4 GTGs deben permanecer en condición operativa.
12Inercia, estabilidad y recursos electrónicos
La inercia del sistema limita la rapidez con que cambia la frecuencia tras un desbalance de potencia activa. La tasa de cambio de frecuencia (RoCoF) es inversamente proporcional a la inercia total:
RoCoF = ΔP / (2H · Sbase) [Hz/s]
donde H es la constante de inercia (MW·s/MVA) y ΔP el desequilibrio de potencia activa. Cuanto menor la inercia, mayor el RoCoF y más exigentes deben ser la respuesta de los gobernadores y el UFLS.
13Step load: tres escenarios transitorios críticos
Tres condiciones transitorias son las más exigentes para el sistema de control y protección en un sistema de generación isla:
AArranque de motor grande (Large Motor Starting)
Durante el arranque directo, la corriente de inrush puede ser 5–7 veces la nominal durante varios segundos. La preocupación principal no es el incremento de MW activos sino la demanda de MVAR del arranque, que deprime el voltaje de la barra principal. El voltaje deprimido afecta el campo interno de los motores de inducción ya en marcha.
- Con 1 GTG solo: verificar por cálculo previo que ese GTG puede arrancar el motor MV más grande. Esta condición ocurre frecuentemente durante comisionado cuando la planta arranca con carga mínima.
- Con múltiples GTGs: la demanda de MVAR se reparte; la caída de V se mitiga. AVR en CCC responde coordinadamente para mantener voltaje de barra.
- Mitigación: VFD o soft starter reducen la corriente de arranque y el pico de MVAR. Secuenciamiento espacia arranques para permitir recuperación entre eventos.
BTrip mecánico de turbina
Un trip inesperado impone un step load de MW y MVAR sobre los GTGs restantes. La capacidad de step load varía por clase y diseño de turbina (single-shaft, two-shaft, hybrid shaft) y debe confirmarse con el fabricante para cada aplicación específica.
- Los GTGs restantes deben absorber el MW adicional dentro de su límite de step load.
- Verificar que el nuevo punto de operación (P nuevo, Q nuevo) está dentro de la curva P–Q del generador.
- Si los GTGs restantes no pueden soportar la carga total, el UFLS debe actuar antes de que la frecuencia colapse.
- Cálculos de estabilidad transitoria son obligatorios — no basta con verificar solo la recuperación de velocidad de la turbina; la respuesta del AVR y la tensión de barra son parte integral del análisis.
CCortocircuito trifásico en generador o cable — escenario más oneroso
El escenario más severo: no solo se pierde el GTG en fault (MW y MVAR) sino que el voltaje de la barra principal se deprime severamente durante el fault, desmagnetizando los motores en marcha.
VFD / Soft Starter
Reducen la corriente de arranque y la demanda de MVAR pico — limitan la caída de voltaje de barra durante el arranque del motor.
Secuenciamiento
Espacia los arranques de motores para permitir que el sistema recupere frecuencia y voltaje entre eventos consecutivos.
Pre-shedding
Desconecta cargas no críticas antes de un arranque de motor grande, liberando capacidad de generación MW y MVAR disponible.
14Curva P–Q y límites operativos
La curva de capacidad P–Q establece la envolvente de operación segura del generador. Fuera de esta región pueden aparecer sobrecalentamientos, esfuerzo eléctrico excesivo en el aislamiento o pérdida de sincronismo.
- Región de sobreexcitación (MVAR positivos, gen suministra Q): limitada por la corriente de campo máxima (calentamiento rotor) y la corriente de armadura máxima (calentamiento estator).
- Región de subexcitación (MVAR negativos, gen absorbe Q): limitada por estabilidad de estado estacionario (ángulo δ máximo) y calentamiento de extremos del núcleo del estator.
- Límite de P: la turbina impone el límite superior de MW independientemente de Q.
15Protección, UFLS y seguridad del sistema
Cuando los sistemas de control ya no pueden mantener el equilibrio P–f y Q–V, las protecciones y los esquemas de load shedding evitan daños mayores o apagones totales. La velocidad de detección y despeje es crítica en sistemas isla de baja inercia.
AJerarquía de protecciones por velocidad
| Función | ANSI | Velocidad | Cobertura y acción |
|---|---|---|---|
| Diferencial de generador | 87G | Muy rápida — relé moderno < 20 ms | Fault en cable generador o devanados → dispara GCB del generador afectado. |
| Diferencial de barra | 87B | Muy rápida — similar a 87G | Fault en barra MT principal → dispara todos los interruptores conectados a la barra. |
| Instantáneo de sobrecorriente | 50 | Rápida, pero retardada por saturación de TC | Alimentadores a cargas directas desde barra principal. Ver nota CT saturation. |
| Diferencial de línea | 87L | Rápida — < 30 ms con fibra óptica | Alimentadores largos a tableros remotos del mismo nivel de voltaje. Recomendado cuando tiempo del 51 supera 400–500 ms. |
| Overcorriente temporizado | 51 | Lenta — 200–500 ms o más | Selectividad aguas abajo. Riesgo: compromete límites de estabilidad transitoria (> 200 ms). |
BFast Load Shedding — UFLS
Moderno (microprocesador + comunicaciones): sistemas de fast load shedding actuales pueden lograr detección del evento + reconocimiento + comando de shed en < 80 ms (sin incluir tiempo de apertura del interruptor), con operación total del sistema < 200 ms con margen amplio.
Arquitectura recomendada: implementar el sistema de UFLS como un sistema independiente y standalone, separado del PMS general. Si el PMS falla, el UFLS debe seguir operativo. Preferir equipos especializados de fast load shedding sobre funciones embebidas en el PMS.
Nota importante: todos los valores anteriores son reglas de guía. Los tiempos específicos para una instalación deben confirmarse mediante estudios de estabilidad transitoria con los parámetros reales del equipo seleccionado.
16Criterios de diseño y pruebas
- Definir escenarios de operación — Carga máxima/mínima, arranques de motores críticos (1 GTG solo vs múltiples), trip del GTG más grande (N→N−1), fault trifásico de generador y barra, y transiciones isla/red.
- Modelar y simular — Flujo de carga (estado estacionario), estabilidad dinámica transitoria y cortocircuito. Verificar RoCoF, desviaciones de f y V, tiempos de recuperación y umbrales de UFLS. Incluir tiempos de saturación de TC en la coordinación.
- Seleccionar filosofía de control — Número de GTGs, modos de gobernador y AVR (isócrono/Load Sharing, AVC/CCC), filosofía UFLS (standalone vs PMS), protecciones (87G/87B/87L como primera línea).
- Validar en FAT y SAT — Pruebas de step load programadas, arranque del motor MV más grande, simulación de trip de GTG y fault de barra. Ajustar parámetros hasta cumplir criterios definidos en paso 1.
¿Cuántos GTGs operarán en paralelo normalmente?
Un solo GTG: gobernador en modo isócrono (load sharing lines cortocircuitadas) para mantener frecuencia constante. AVR en control automático de voltaje (52bCCC cortocircuitados) para mantener voltaje constante. Sin coordinación entre unidades. Priorizar: verificar capacidad de step load para el motor MV más grande que pueda arrancar en este escenario de 1 GTG solo.
Primera elección para islanding no complejo con GTGs del mismo fabricante en la misma barra: gobernadores en Isochronous Load Sharing (load sharing lines o peer-to-peer) + AVRs en CCC (TCs interconectados, resistores compartidos, contactos 52bCCC activos). Resultado: frecuencia constante, voltaje constante, MW y MVAR repartidos proporcionalmente. Alternativa aceptable: droop + droop, pero requiere PMS o intervención del operador para restaurar f y V nominales tras una perturbación.
Con conexión a la red de la utilidad, el GTG sigue la frecuencia de la red (barra infinita). Modos AVR aplicables: Power Factor Control (mantiene cos φ constante según MW) o VAR Control (MVAR fijo). Coordinar con el operador de red los límites de inyección/absorción de reactivos y los requisitos de protección de interfaz (relé de isla, 81U/O, 27/59, 25 sincronización).
17Conclusiones
Conclusiones y criterios de diseño
La frecuencia y el voltaje son dos manifestaciones del mismo problema: mantener en equilibrio dinámico la potencia activa y reactiva entre generación, carga y red. Gobernadores, AVRs, CCC, PMS y protecciones son piezas de un sistema integrado de estabilidad.
Para sistemas isla no complejos de oil & gas o petroquímica, la selección de estrategia es directa: 1 GTG → isócrono + AVC; ≥2 GTGs → Isochronous Load Sharing + CCC. El mecanismo de VDERIVED del droop reactivo es la base del reparto de MVAR — entenderlo es esencial para aplicar CCC correctamente y para diagnosticar problemas de polaridad de TC.
El dimensionamiento de redundancia (N → N+1 → N+2) debe considerar no solo la carga estacionaria sino los requisitos de MVAR en arranques de motor grande. Protección 87G, 87B y 87L como primera línea, y UFLS standalone independiente del PMS, son los últimos garantes de continuidad operativa.
- Confirmar estrategia de gobernador y AVR con el fabricante del GTG — nomenclatura y algoritmos varían por fabricante
- Realizar estudios de estabilidad transitoria para los tres escenarios: trip de GTG, arranque de motor grande y fault trifásico de generador
- Implementar UFLS como sistema standalone independiente del PMS
- Incluir tiempos reales de saturación de TC en la coordinación de protecciones y estudios de estabilidad
- Verificar polaridad de TC y rotación de fases en la implementación de CCC y droop reactivo con el fabricante del AVR
18Glosario de términos
| Término | Definición |
|---|---|
| AVR | Automatic Voltage Regulator. Regulador automático de voltaje del generador. Ajusta la corriente de campo del excitador para mantener el voltaje terminal dentro de una banda de tolerancia. Actúa en decenas de milisegundos e incorpora limitadores OEL, UEL y V/Hz. |
| CCC | Cross Current Compensation — Compensación de Corriente Cruzada. Modo AVR para reparto de MVAR sin caída de voltaje entre ≥2 generadores en paralelo. Los TCs de fase B se interconectan mediante resistores de carga compartidos; con reparto igualitario las corrientes se cancelan y VDERIVADA = 0. |
| Droop (frecuencia) | Característica del gobernador que reduce la velocidad/frecuencia al aumentar la carga MW. Permite reparto proporcional de carga activa entre gobernadores sin cableado de coordinación. Valor típico: 4–5 %. |
| Droop reactivo | Característica del AVR que reduce el voltaje terminal al aumentar la carga MVAR inductiva, y lo eleva con carga capacitiva. Base del mecanismo VDERIVED. Provoca caída de V de hasta 5–6 % a plena carga. |
| FAT / SAT | Factory Acceptance Test / Site Acceptance Test. Pruebas de aceptación en fábrica y en sitio para validar el sistema de control antes y después de la instalación. |
| GCB | Generator Circuit Breaker. Interruptor principal del generador ubicado entre éste y la barra de distribución. Sus contactos auxiliares 52b (normalmente cerrados) se usan en la lógica de CCC y otros esquemas de protección. |
| GTG | Gas Turbine Generator. Grupo turbina de gas + generador síncrono. En sistemas industriales islanding de oil & gas, es la fuente de generación eléctrica principal. |
| H — Constante de inercia | Constante de inercia del generador en MW·s/MVA. Cuantifica la energía cinética almacenada en la masa giratoria. Determina la velocidad de cambio de frecuencia (RoCoF) ante desequilibrios: a mayor H, menor RoCoF. |
| Inercia sintética | Capacidad de un convertidor VSC (BESS, eólico, solar) para emular la respuesta inercial de una máquina giratoria inyectando potencia proporcional a df/dt durante los primeros ciclos post-perturbación. No sustituye la inercia física. |
| Islanding | Operación de un sistema eléctrico aislado de la red pública, dependiendo únicamente de su propia generación. En islanding, los GTGs deben controlar tanto la frecuencia como el voltaje de la barra, sin referencia externa. |
| N / N+1 / N+2 | Niveles de redundancia de generación: N = GTGs mínimos para carga estacionaria; N+1 = GTGs adicional para absorber el trip de una unidad; N+2 = garantiza N+1 disponibles con una unidad en mantenimiento. |
| OEL / UEL | Over Excitation Limiter / Under Excitation Limiter. Limitadores del AVR que protegen el rotor (OEL) y la estabilidad del generador (UEL) restringiendo la corriente de campo mínima y máxima permitida. |
| PMS | Power Management System. Sistema de gestión de potencia que coordina arranque/parada de GTGs, esquemas UFLS y ajuste de referencias en gobernadores/AVRs. Actúa en la capa de control secundario, después de que los algoritmos propietarios del fabricante ya operaron. |
| PSS | Power System Stabilizer. Función opcional del AVR que inyecta una señal amortiguadora basada en desviaciones de velocidad o potencia activa para reducir oscilaciones electromecánicas en la red. |
| RoCoF | Rate of Change of Frequency — df/dt. Tasa de cambio de frecuencia en Hz/s. Indicador de severidad de un desequilibrio de potencia activa: RoCoF = ΔP / (2H · Sbase). Usado como señal de disparo en protecciones de isla y UFLS modernos. |
| 52bCCC | Contacto normalmente cerrado del GCB (contacto 52b) conectado en serie en el circuito CCC. Abre cuando el GCB está cerrado (GTG en línea), activando el circuito CCC. Cierra cuando el GCB abre (GTG fuera de línea), cortocircuitando el TC y desconectándolo del circuito CCC. |
| TC / CT | Transformador de Corriente / Current Transformer. Reduce la corriente de línea a un valor medible (típico 5 A o 1 A secundario) para protecciones y medición. En droop reactivo y CCC se usa el TC de fase B (Ib) como señal de referencia de carga reactiva. |
| UFLS | Under Frequency Load Shedding — Deslastre de Carga por Baja Frecuencia. Esquema automático que desconecta cargas no esenciales cuando la frecuencia cae por debajo de umbrales definidos (típico 59–59.5 Hz). Moderno: detección + reconocimiento < 80 ms, tiempo total < 200 ms. Implementar como sistema standalone independiente del PMS. |
| VDERIVED | Señal de voltaje derivada del AVR: VDERIVED = Ib × Rext. Generada por la corriente de fase B fluyendo por el resistor externo. Su ángulo respecto a Vac indica el tipo de carga reactiva y determina la respuesta correctiva del AVR. |
| 87G / 87B / 87L | Protección diferencial de generador (87G), de barra (87B) y de línea (87L). Detectan corrientes diferenciales indicativas de faults internos. 87G es la protección más rápida (< 20 ms) y la primera línea de defensa contra faults en el generador. No afectada por saturación de TC. |
Referencias Técnicas
- R. E. Cossé, T. P. Nguyen. Gas Turbine Generator Governor Speed/Voltage Control for Non-Complex, Islanding Operating Systems — «Which Control Strategy Should I Use?» IEEE PCIC Conference Paper. Chevron U.S.A., Houston TX.
- R. Cossé, M. Alford, M. Hajiaghajani, E. Hamilton. Turbine/Generator Governor – Droop/Isochronous Fundamentals. IEEE IAS Magazine, Vol. 19, Issue 4, pp. 56–62, 2013.
- E. Hamilton, P. Hamer, S. Manson, J. Undrill. Considerations for Generation in an Islanded Operation. IEEE Transactions on Industry Applications, Vol. 46, Issue 6, pp. 2289–2298, Nov.–Dec. 2010.
- IEEE Std. 421.1-2007. IEEE Standard Definitions for Excitation Systems for Synchronous Machines. IEEE, New York.
- Woodward. Governing Fundamentals and Power Management. Reference Manual 26260, Fort Collins CO, ch. 3, p. 31, 2004.
- IEC 60034-1:2017. Rotating Electrical Machines — Rating and Performance. IEC.
- IEEE C37.2-2008. IEEE Standard for Electrical Power System Device Function Numbers, Acronyms, and Contact Designations. IEEE.
- IEEE 242-2001. IEEE Recommended Practice for Protection and Coordination of Industrial and Commercial Power Systems. IEEE.
- ISO 3046-1:2002. Reciprocating Internal Combustion Engines — Performance. ISO.